

The past two km chiliads (since 3000 km) were notable for two accidents, keeping the rate at a stubborn one per 1000 km. First, a minor low-speed tip-over that occurred while playing tag with a relative on roller skates. Some people take pride in playing hard. The second was more troubling:
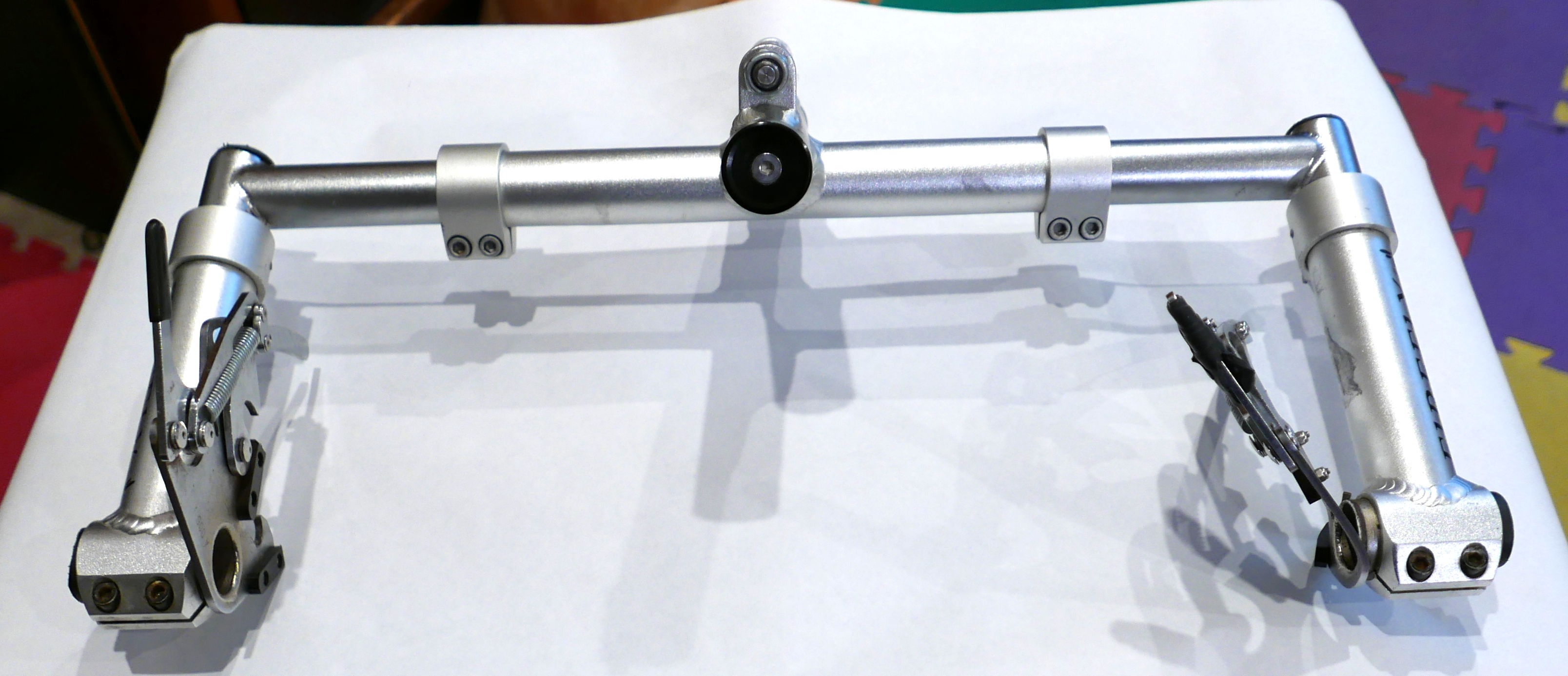
Near the top speed (23 km/h), I lost steering control and crashed diagonally into a curb, causing the wheelchair to flip. I think the left Firefly attachment had separated from the wheelchair, and the right clamp by itself was too weak (picture below), causing the loss of steering.
I don't know why the left connection let go. Perhaps I forgot to flip the quick-release lever or the pins weren't fully seated or resonance caused the mechanism to disengage. Just before the crash, I rode over a rumble strip whose vibrations must have caused the final separation. It would be wise to check for any self-loosening in the future and maybe add latch retainers.
Fortunately, the bruising and road-rash are temporary. I replaced the trashed right-side attachment clamp, but my wheelchair is crooked now, with the right frame leg bent back by about half an inch and downward by a quarter inch. Considering my usual routes, the consequences of veering sideways uncontrollably could have been a lot more serious.

On a positive note, the QIND Q-211 tire continues to last beyond 2400 km with no visible cords. The front axle has stayed tight since switching to the VESC controller nearly 700 km ago, despite heavy use of regen-braking.













