This page describes a voice-controlled shoulder-harness lift to help with transfers to/from my wheelchair. I have advanced MS with some remaining leg strength and use the lift for independent pivot transfers. Besides featuring hands-free control, the design loops under the arms and pulls up with controlled force, much like a human assistant.
As of November 2024, I built (with help of a good handyman) two three of them (bed & bath and a horizontal one that pulls me onto the bed at night). They have done their job over 200 times with only a few glitches due to since-fixed bugs. Why build your own? Even the doctor told me not to: Those things never work. But they do and I'm unaware of commercial options that allow hands-free voice control. Further benefits are flexibility, precise trajectories, and wall-mounting. In an earlier life I invented, designed, and built sophisticated equipment for others. There is satisfaction in using the skill for a personal need. Independence is valuable.
I'll try to document the lifts better, but for now show a video, some pix, and notes/drawings/code. Let me know if you have ideas for improvement or are interested in the design!

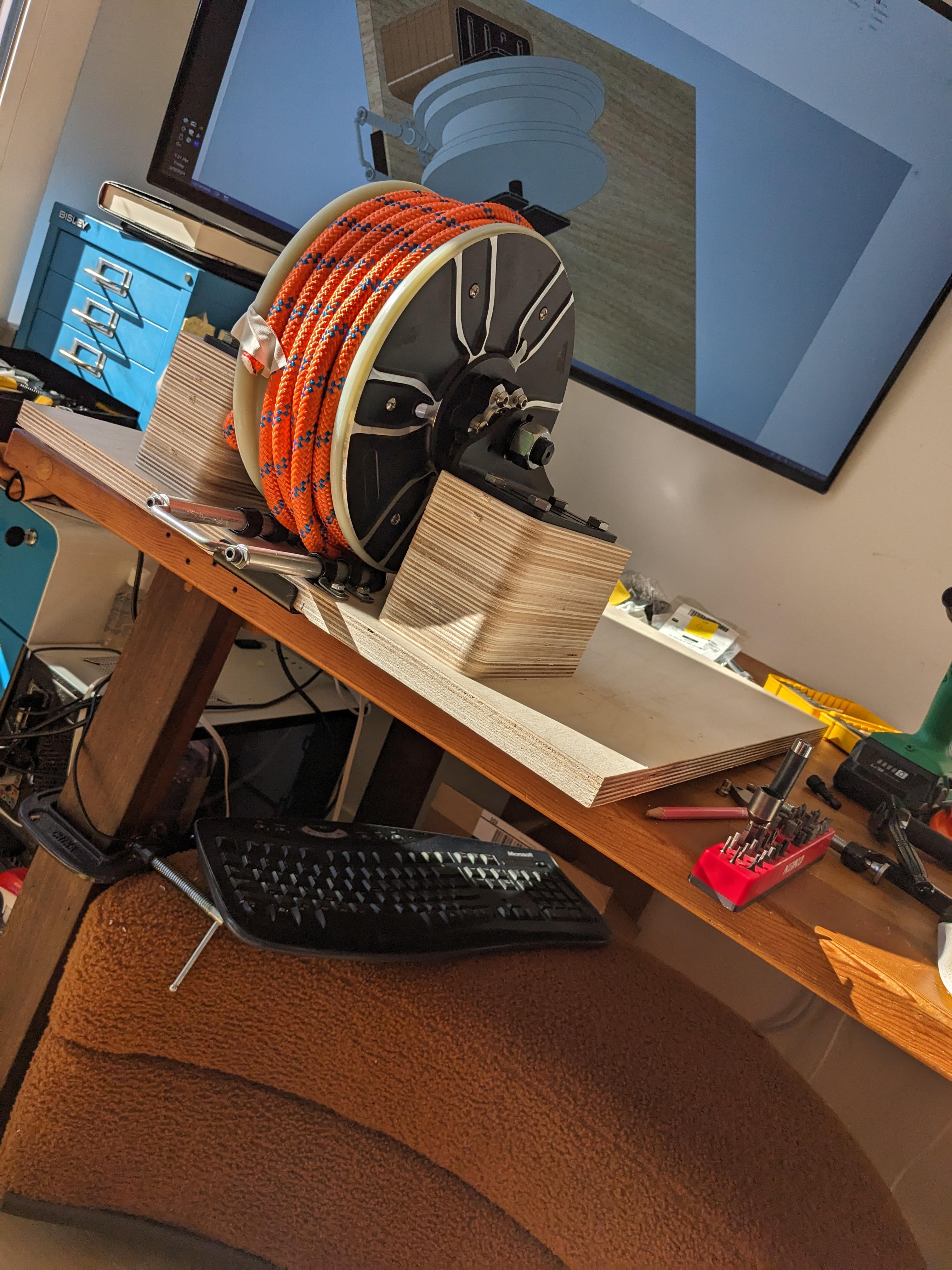
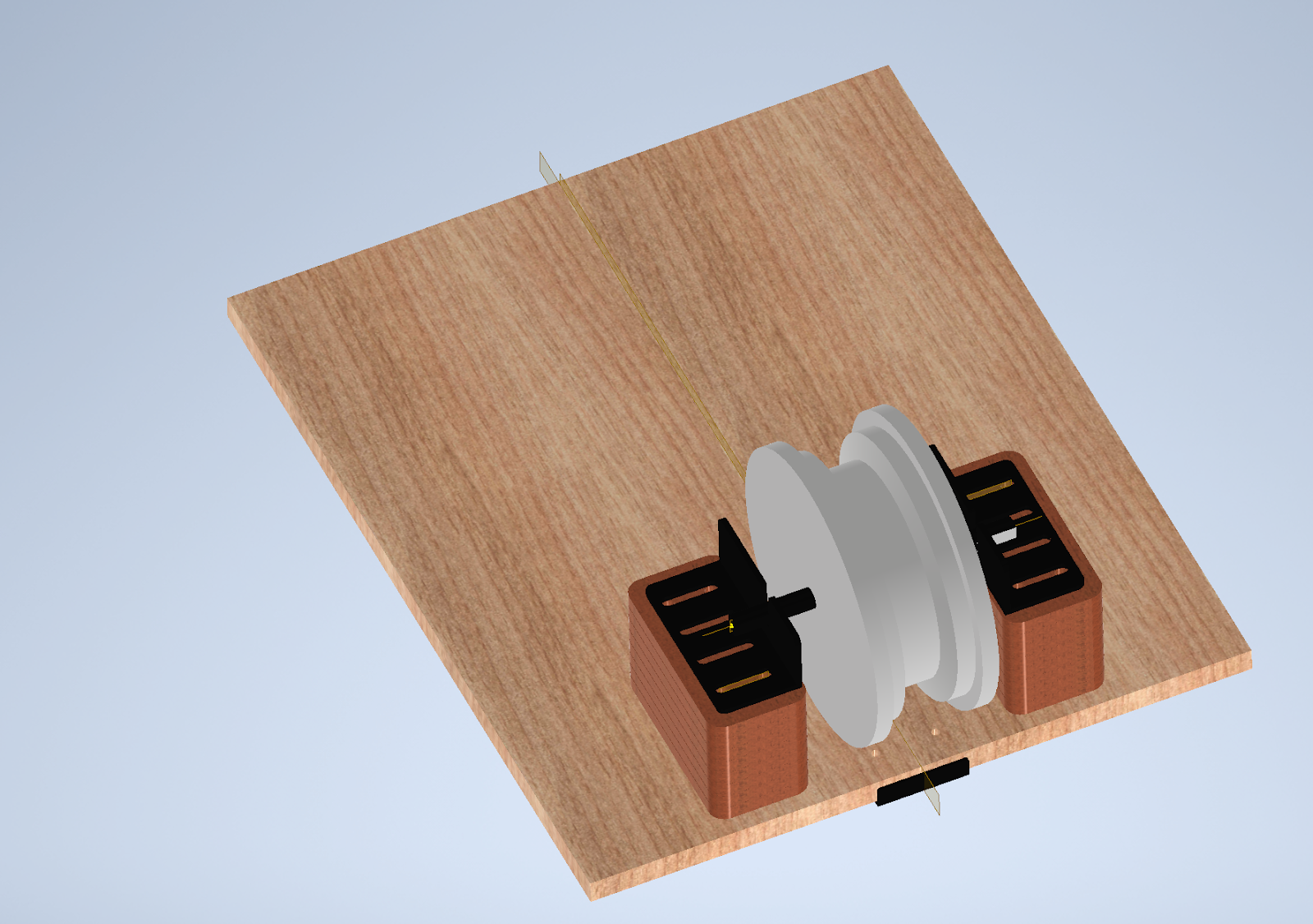
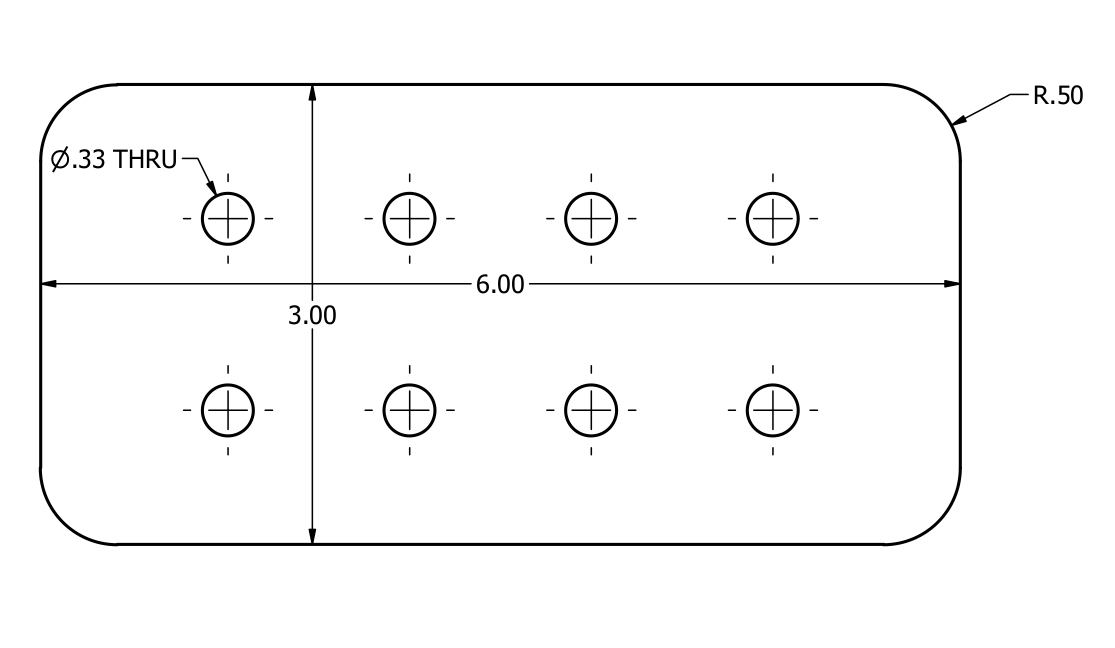
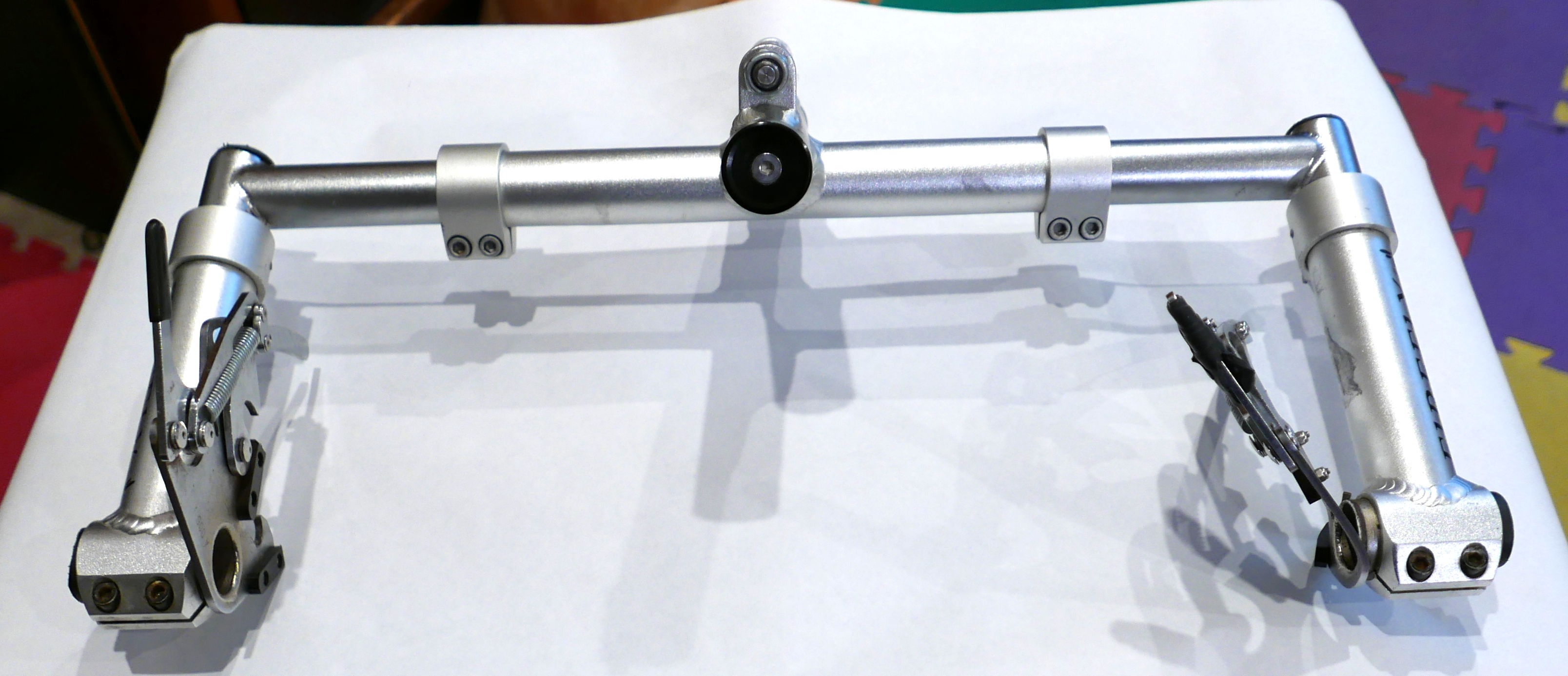
On the bench: